LiPo y chasis
LiPo
Vamos a alimentar nuestro robot con una batería LiPo de dos celdas, unos 7.4v. Aunque los motores son de 6v, limitaremos el PWM máximo para no llegar a los límites. Aunque no es exactamente lo mismo alimentar el motor a 6v que a 7.4v con un ciclo del 80% de pwm, confiamos en que no sufran demasiado.
Disponíamos de estas baterías, así que son las que vamos a utilizar.
Para un robot de altas prestaciones esta batería sería algo pesada, pero para nuestro pequeño robot experimental parece aceptable. El conector JST resulta ser algo incómodo de usar, algo a tener en cuentra para futuras versiones.
Chasis
Para empezar a ver a nuestro robot moviéndose, necesitamos poner lo que tenemos hasta ahora en algún tipo de chasis. Vamos a utilizar una baquelita de 7x9cm, a la que le soldaremos unos pines hembra para el arduino y el puente H, un conector JST para la batería y un pequeño interruptor para poder desconectar la batería fácilmente y diseñamos en FreeCad un pequeño chasis en el que atornillar la baquelita, unos pequeños soportes para los motores y una bola loca de apoyo.
Los archivos de esta versión están en el la carpeta 3d del código fuente, aunque tienen bastantes problemas:
-
No hemos calculado bien la disposición de los taladros para la baquelita en la pieza baquelita-mount. Hemos pensado que eran simétricos y no lo son: así que hubo que tirar de soldador para desplazar los agujeros.
-
Los soportes del motor han resultado ser un poco blandenges y giran sobre sí mismos en el chasis. Por ahora pueden funcionar, pero es un mal diseño.
-
Uno de los motores tiene cierta holgura en el soporte impreso, así que improvisamos un nuevo agujero en el frontal en el que atornillar un pequeño tornillo m3 que apriete el motor contra el plástico. También es un mal diseño, pero tenemos ganas de empezar con la programación así que va a quedar así por ahora.
Conexiones
Las conexiones son triviales: el puente H al arduino y los motores tal como se explica en el post anterior, el negativo de la batería a tierra, y el positivo al una pata del interruptor. La otra pata irá al Vin del arduino.
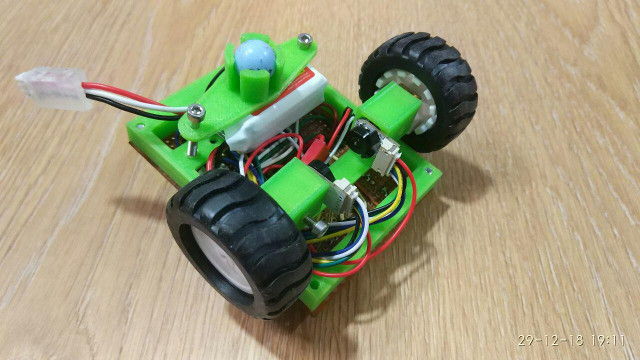
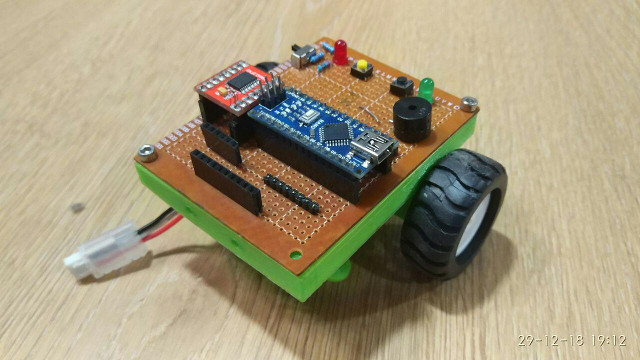
Estado actual
Por ahora, nuestro robot tiene la siguiente apariencia: hay un buzzer, diodos y switchs en la placa que por ahora están sin conectar e iremos viendo si los utilizamos o no. Además hay conectores frontales para los futuros sensores y una conexión para bluetooth que iremos viendo.