Construcción · Parte electrónica
El circuito
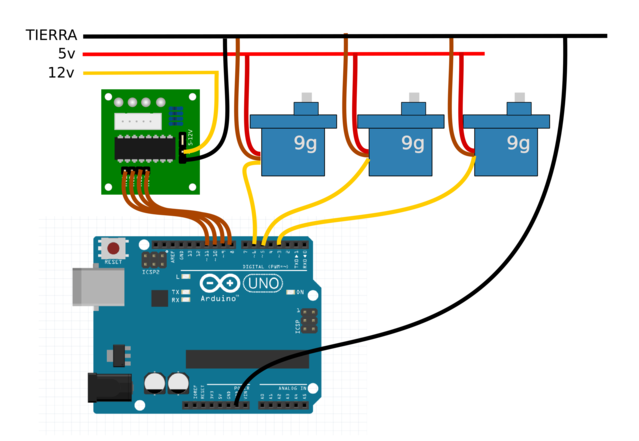
Este es un esquema de las conexiones de nuestro circuito. Simplemente tendremos que conectar los servos a 5v, el cable de señal de cada uno de ellos a un pin pwm del arduino (en este caso hemos elegido el 4,5 y 7), 12v en la entrada correspondiente del driver y conectar todas las tierras (los servos, el driver, y el arduino). Las entradas IN1, IN2, IN3 e IN4 del driver las conectamos a los pines 8, 9, 10 y 11 del arduino.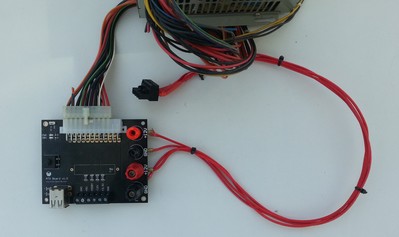
Un poco de Arduino y alimentación
La dificultad principal de esta parte es, precisamente, decidir cómo vamos a alimentar nuestro circuito, teniendo en cuenta que se necesitan 12v para el motor y 5v para los servos y el arduino.
En principio, este robot estará siempre conectado a un ordenador a través del puerto USB, que puede proporcionar hasta 500mA de corriente. Dado que un servo puede necesitar del orden de 120mA, con tres servos mas el propio consumo del arduino estamos en el límite de la especificación USB, así que hemos decidido proporcionar los 5v a los servos con una fuente de alimentación externa.
También necesitamos 12v para alimentar el motor. Como necesitamos dos voltajes, una opción muy cómoda es utilizar una fuente ATX de cualquier ordenador viejo. Hay muchos tutoriales en internet de cómo utilizar las fuentes ATX como fuentes de laboratorio. Y si no quieres estropear tu fuente, siempre puedes utilizar placas como la ATX Board de staticboards.com que se enchufa directamente al conector de la fuente y ofrece conectores con los distintos voltajes.
Preparando un escudo
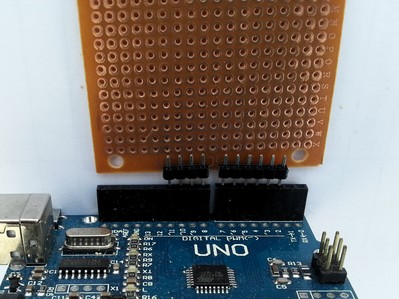
Para facilitar las conexiones y minimizar un poco el efecto spaghetti vamos a construir un escudo muy sencillo, que podremos pinchar en nuestro arduino, y que dispondrá de los conectores para enchufar directamente los servos y el motor.
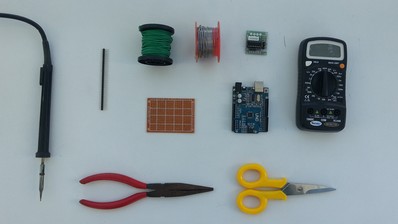
Utilizamos una pequeña placa perfboard, una tira de pines macho y las herramientas habituales (soldador, tijeras, alicates, un poco de estaño, cable). También es muy comveniente disponer de un polímetro para comprobar que las conexiónes están perfectamente soldadas y no hay cortocircuitos.
Preparando los pines
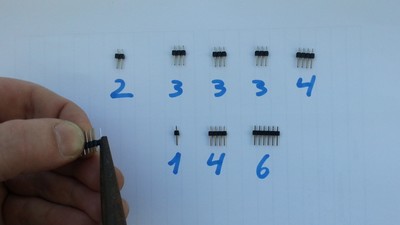
Utilizamos unos alicates para cortar la tira de pines en trocitos. Necesitaremos una tira de 6 pines, 2 de 4, 3 de 3, 1 de 2 y 1 de uno.
Alineando la primera hilera
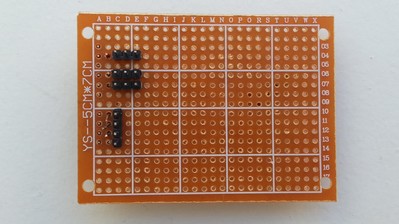
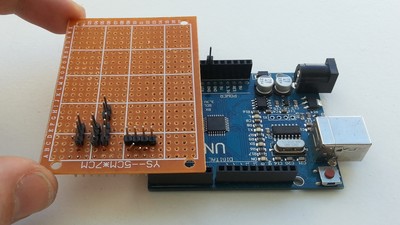
Lo primero que vamos a alinear es la fila de pines que irán conectadas a la señal de los servos y a los motores. Fíjate que en los conectores del arduino UNO no se pueden hacer coincidir exactamente con los agujeros de la perfboard. Esto lo arreglaremos al final doblando un poco los pines de nuestro escudo.
De lo que se trata aquí es de ver en qué sitio vamos a empezar a soldar, dejando un agujero en la perfboard entre la hilera de 4 y la de 6 pines.
Empezando a soldar
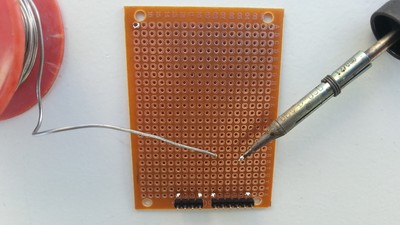
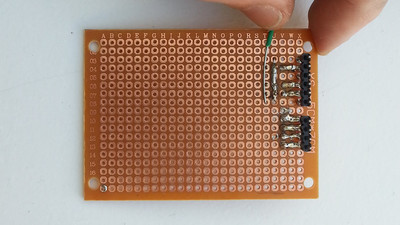
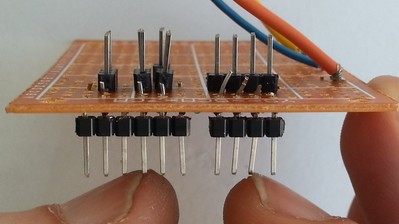
Comenzamos a soldar los pines a la perfboard. Suelda primero los pines de los extremos, asegúrate que están perfectamente alineados y luego suelda el resto.
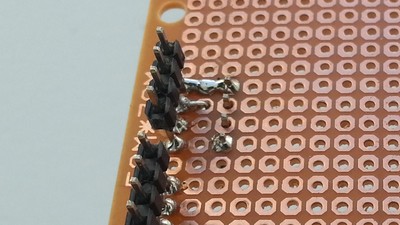
Los pines no están puestos al revés en la foto; lo que hacemos es soldar la parte larga del pin a la placa, y al final del trabajo (una vez soldados todos los cables) empujaremos la parte de plástico negro hacia abajo para que la parte que asome haga contacto perfectamente con los conectores del arduino.
Uniendo los pines de los motores
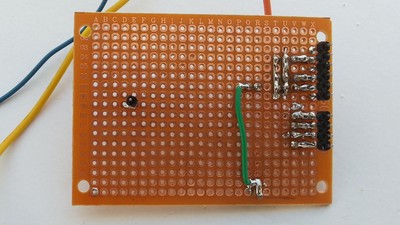
La hilera de 4 pines es la que finalmente se conectará con las entrdas IN1, IN2, IN3 e IN4 del driver. Ponemos otra hilera de 4 pines en el lado contrario de la placa y conectamos uno a uno ambas hileras.
Es conveniente ayudarse de un trozo de cable para hacer el puente entre los dos pines.
Pines para los servos
Continuamos colocando tres hileras de 3 pines en donde irán conectados los servos. Fíjate en la foto que aparecen dos hileras juntas y otra separada, para que estén alineadas correctamente con los pines pwm del arduino (4, 5 y 7 en este caso)
Más conexiones para los servos
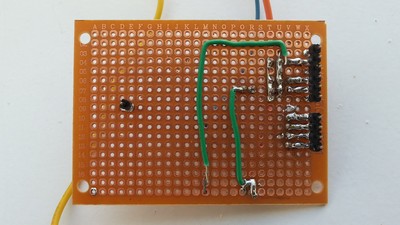
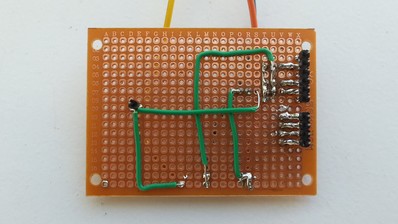
Unimos los pines que irán pinchados en el arduino (la hilera de 6) al pin más cercano de cada hilera de 3 que colocamos en la parte contraria. Este será el pin de señal.
Además, soldamos conjuntamente todos los pines centrales de cada hilera de 3, que se corresponden con los 5v, y los pines restantes de la misma hilera, que se corresponde con la tierra. Como hizimos anteriormente, utilizamos un trozo cable que nos facilite la soldadura.
Colocando el pin de tierra y el conector de 12v
Para conectar la tierra de nuestra fuente (que irá conecctada a la perfboard) necesitamos sacar un pin que se conectará a la tierra del Arduino. Para colocar correctamente este pin, lo enchufamos a la una entrada GND del arduino, presentamos la placa y anotamos la fila en la que tendrá que ir soldado nuestro pin.
También colocamos la hilera de dos pines al lado de los conectores de los servos. Este conector nos proporcionará los 12v que llevaremos al driver del motor.
Conectando el pin de 12v
Ya sólo nos falta soldar tres cables a nuestra placa (tierra, 5v y 12v) que serán los que conectemos a nuestra fuente de alimentación.
Pelamos un trozo de cable, lo pasamos por uno de los agujeros del borde de la placa y lo soldamos. Desde esa misma soldadura sacamos un cable que uniremos a uno de los pines de la hilera de 2 (esta será la toma de 12v para el driver)
Conectado los pines de 5v de los servos
De la misma manera, colocamos otro cable desde la parte de atrás de la placa (la parte que no tiene cobre), lo soldamos y unimos esta soldadura a la hilera del medio de los conectores de 3 pines (de los servos). Este será el cable que alimentará los servos.
Conectando la tierra
ólo falta conectar un nuevo cable al pin "suelto" (que es el que pincha en la tierra del arduino). Además conectaremos esta tierra al pin que queda de nuestro conector de 12v y a la hilera de los servos que también falta. Fíjate en la foto que colocamos el cable en el medio de la hilera de tierras de los servos y la tierra del conector de 12v. Así uniremos fácilmente las estas dos tierras.
Doblar los pines
Para que el escudo encaje en el arduino, debemos acercar suavemente los pines de la hilera de 6 y 4. Utiliza las uñas, de 2 en dos, y dóblalos un pelín hasta que compruebes que entran perfectamente.
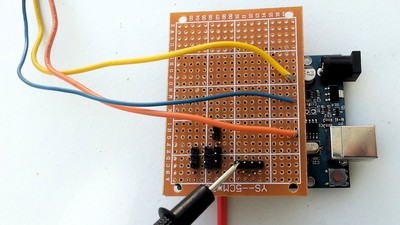
Comprueba las conexiones
Ya tenemos la parte electrónica montada. Comprueba con un polímetro que todas las conexiones están bien hechas. Utiliza el esquema del principio de la página para guiarte. Sobre todo, asegúrate que no hay ningún cortocircuito entre las conexiones de tierra, 5v y 12v.
Y ya está!
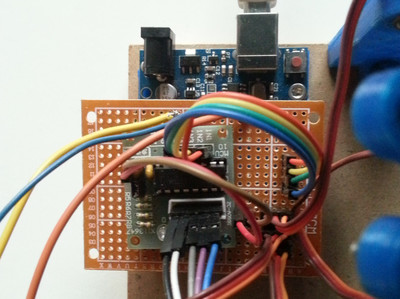
Ya puedes conectar los tres servos a las hileras de tres pines, los pines del motor al driver, las cuatro salidas del driver al escudo y la alimentación del driver que sacamos a través del conector de 2 pines.
Fija el driver al escudo (nosotros utilizamos un poco de cinta de doble capa) y el arduino a la base de madera.
Y ya sólo falta instalar el firmware y hacer los útimos ajustes!