Lista de materiales
Piezas impresas
Esta es la descripción de las piezas impresas que aparecen en la carpeta 3dmodel del repositorio de github. Las piezas están disponibles en formato Freecad (fcstd) para que se puedan editar fácilmente, y también en formato stl para que se puedan imprimir directamente pasando por el programa fileteador que prefieras. Nosotros las imprimimos con un relleno del 30% y es suficiente.
| Imagen | Pieza(STL) |
|---|---|
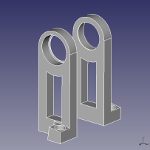 |
soporte-lateral-izq.stl y soporte-lateral-der.stlNecesitas dos piezas simétricas. Ojo, no son iguales porque tienen un pequeño reborde que impide que el rodamiento se salga en caso de que haya cierta holgura. |
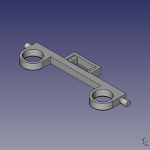 |
hombros.stlLos hombros se colocan entre los dos soportes laterales, y sostienen el servo que mueve las pinzas. Además dan soporte a los rodamientos en los que encajan los brazos. |
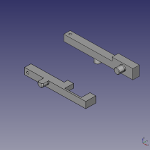 |
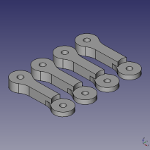
brazo-izquierdo.stl y brazo-derecho.stlLos brazos encajan en los rodamientos de los hombros. El brazo izquierdo tiene un hueco para alojar el servo que mueve la muñeca. |
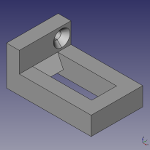 |
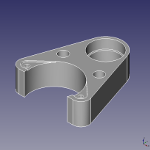
soporte-servo-grua.stlEsta pieza también aloja un servo, que es el que tira de la polea conectada a los hombros para permitir que los brazos suban y bajen. |
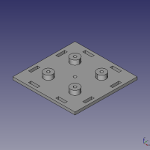 |
base-cuadrada.stlAquí se apoya el cubo. Tiene cuatro huecos para atornillarlo a la rueda dentada que engrana con el motor, y unos huecos para introducir las solapas que permiten girar una cara del cubo cuando los brazos están cerrados. |
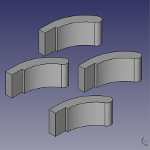 |
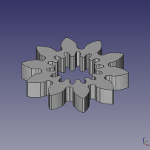
solapas-base.stlNecesitas al menos cuatro de estas pequeñas piezas, que son las que hacen que el cubo se mueva cuando se mueve la base. Hay ocho huecos en la base cuadrada para estas piezas, aunque nosotros hemos comprobado que con cuatro es suficiente. |
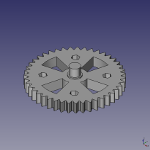 |
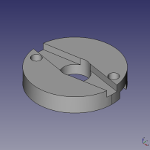
rueda-dentada-grande.stlEsta rueda engrana con la pequeña que está unida al motor. En ella insertamos el rodamiento que encaja en el soporte del motor y también en ella se atornilla la base cuadrada en la que se apoya el cubo de Rubik. |
 |
rueda-dentada-pequena.stlEsta pequeña rueda se inserta en el eje del motor. |
 |
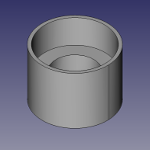
base-motor.stlEn esta pieza encaja nuestro motor y el rodamiento que aloja la rueda dentada grande. |
 |
capuchon-muneca-der.stlSe inserta un rodamiento en esta pieza y éste se encaja en el brazo derecho, para que el cubo gire con libertad cuando el servo del otro brazo se mueva. |
 |
enganche-servo-pinza.stlEsta pieza se atornilla al aspa del servo encajado en los hombros. En ella atornillamos a su vez las plaquita-pinza que se unen a los brazos para poder abrirlos y cerrarlos. |
 |
plaquita-pinza.stlSe utilizan cuatro de estas piezas (dos en cada lado), para unir el enganche-servo-pinza a los brazos. No usamos una única pieza para poder ajustar con precisión la apertura de los brazos. , |
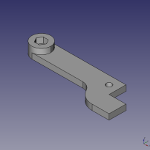 |
apoyo-grua.stl1 Esta pieza esta atornillada en el hombro y enganchada al servo trasero. |
Vitaminas
Como también se dice en el mundo de las impresoras auto-replicantes (repraps), llamamos vitaminas a todas aquellas partes que NO SE PUEDEN IMPRIMIR y que hay que comprar
| Imagen | Nombre | Cantidad | Precio aprox. | Comentarios |
|---|---|---|---|---|
 |
Rodamientos 8x22x7 | 6 | < 1 € | Hacen falta 6 rodamientos axiales. No es necesario que sean de muy buena calidad ya que no van a soportar grandes fuerzas. La referencia 8x22x7 se refiere a las medidas del rodamiento (diámetro del agujero, diámetro exterior y ancho). |
 |
Tornillos y tuercas M3 | Varios | < 1 € | Necesitas varios tornillos y tuercas M3. Puedes comprarlos en muchas ferreterías. Nosotros los utilizamos con cabeza hexagonal (para llaves allen). Si quieres comprar una buena cantidad, para futuros proyectos, rationalstock.es tiene buenos precios. |
 |
Base de madera | 1 | < 1 € | Utiliza cualquier trozo de madera (melamina, dmf...) para atornillar la estructura. La medida mínima es 130x150 mm, aunque es muchísimo mejor usar una algo más grande para dejar hueco para el arduino y futuras ampliaciones (una botonera, un display, un soporte para cámara web...). La nuestra mide 150x230 mm. |
Electrónica
Además de esta lista de componentes necesitaras el típico material necesario para proyectos de este tipo (algo de cable, un soldador, estaño)...
| Imagen | Componente | Cantidad | Comentarios |
|---|---|---|---|
 |
Arduino UNO | 1 | Podrás utilizar cualquier tipo de Arduino que tenga al menos siete salidas digitales (3 de ellas pwm). |
 |
Servos 9g | 3 | Los servos 9g son muy baratos y muy sencillos de usar para proyectos caseros de robótica. Se necesitan 3 para Robik. |
 |
Motor paso a paso | 1 | Usamos el motor con referencia PM35S-048-HPL2, que tiene la ventaja de que tiene muy poca altura. |
 |
Driver motor | 1 | Necesitamos un driver basado en el ULN2003. |
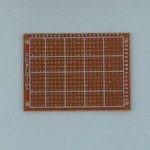 |
Perfboard | 1 | No es necesario, pero para dejar los cables un poco más ordenados es conveniente hacer un pequeño escudo con una perfboard y unos pocos pines. |
 |
Pines macho | 1 | Pines para hacer nuestro escudo. |
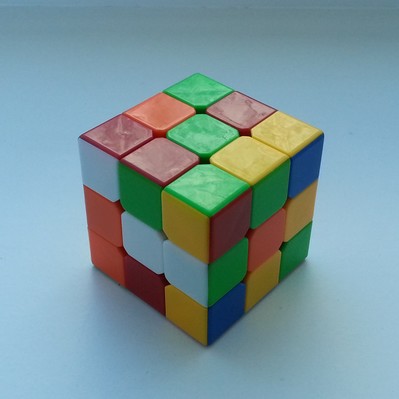
... y no te olvides del cubo de Rubik!
Evidentemente, el robot es mucho más divertido si tienes algo que pue pueda manejar. Necesitarás un cubo de competición. No sirven los cubos baratos que encuentras en jugueterías, e incluso es posible que un cubo original de Rubik sea demasiado recio para el robot.
De todos modos, no hay que preocuparse por el precio: los cubos de competición, que tengan un buen corte de esquinas son, de hecho, más baratos que el original.
Existen muchos modelos distintos, y para gustos se hicieron los colores. Nosotros utilizamos un Dayan ZhanChi stickerless.