Robik
El robot imprimible que puede mover el cubo de Rubik
Lista de materiales
Además de las piezas impresas en 3D, necesitas una placa Arduino (nosotros utilizamos un UNO), un motor paso a paso con su correspondiente driver, tres servos y algunas "vitaminas" como tornillos y tuercas, rodamientos...
Guía de construcción
Aunque el robot es muy sencillo de construir, tanto su parte electrónica como su parte mecánica, aquí puedes ver una pequeña guía fotográfica para ayudarte en el proceso.
Firmware y Software
En nuestro github está disponible, tanto el firmware necesario para subir a Arduino, como algunos ejemplos de programas para jugar con tu robot.
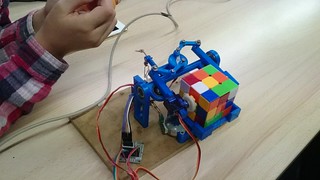
Cómo funciona
Robik puede abrir y cerrar sus brazos para agarrar un cubo de Rubik de tamano standard. Cuando sus brazos están cerrados, girando la base se mueve la cara de la parte inferior del cubo. Los brazos también pueden subir y bajar de manera que cuando el brazo está levantado, el servo de su muñeca permite girar el cubo entero sobre si mismo (en el eje X). Y si el cubo está descansando en la base y los brazos están abiertos, girando la base el cubo gira sobre su eje Y.
Con estas simples instrucciones (abrir/cerrar brazos, girar muñeca, levantar/bajar brazos y girar base) se pueden hacer todos los movimientos posibles en un cubo.
Para qué sirve
Seamos sinceros: para bastante poco.
Este robot está pensado para introducirse en el diseño 3D, aprender un poco sobre la programación con Arduino, y luego permite experimentar con él haciendo programas en cualquier lenguaje que tenga la posibilidad de utilzar el puerto serie (Python, C...). Es muy fácil diseñar nuevas piezas (quizá para incorporarle algún sensor, cambiar el tipo de motor), y es muy fácil de programar un nuevo firmware (al fin y al cabo sólo tiene tres servos y un motor!)
Al mismo tiempo, la propia complejidad del cubo de Rubik abre las posibilidades para diseñar programas más complejos, como un entrenador de secuencias (para speedcubers) y, por qué no, programar un solver utilizando una cámara web.
Primeros pasos de Robik