Construcción · Parte mecánica
Preparando todas las piezas
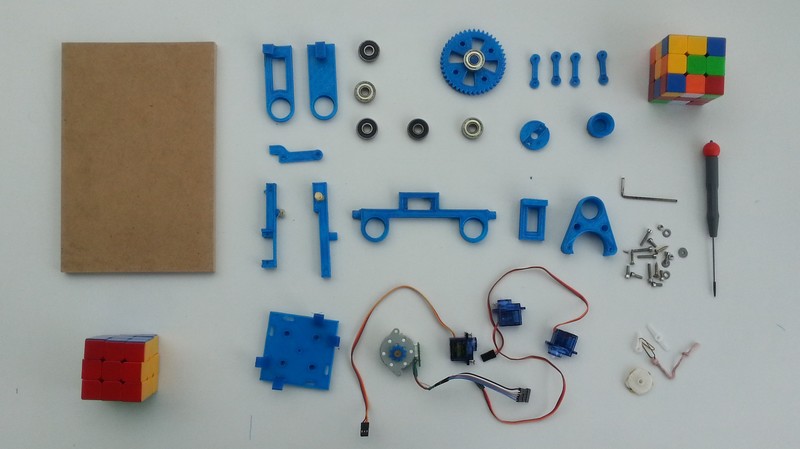
En esta primera parte vamos a montar la parte mecánica del robot. Necesitaremos todas las piezas impresas, los rodamientos, tornillos, tuercas, así como lo servos y el motor paso a paso.
Uniremos todas las partes y la atornillaremos en la base que hayamos elegido.
Como herramientas únicamente nos hará falta una llave de allen y un destornillador para unir la estructura a la base.
Es conveniente también disponer de una pequeña lima por si algunas piezas no encajan correctamente.
Colocando rodamientos
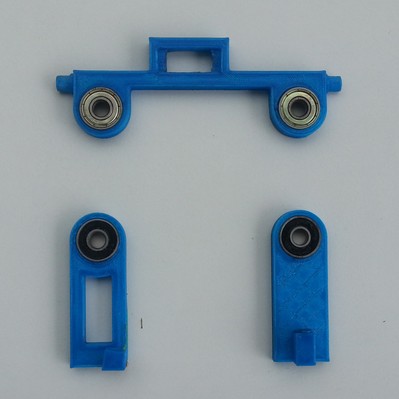
Insertamos los rodamientos en los huecos disponibles en los soportes laterales y en los "hombros". Quizá tengas que limar un poco los agujeros del plástico para que entren perfectamente.
Colocando servos
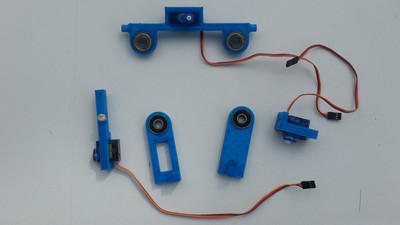
Continúa colocando el servo de los hombros, el del brazo lateral (izquierdo) y el que encaja en el "soporte grua".
Al igual que en el caso anterior, el cable del servo puede estorbar a la hora de introducirlo en el agujero del hombro y necesitarás limar la pieza. Una vez correctamente colocados,, atornillalos para que queden perfectamente fijados.

La base
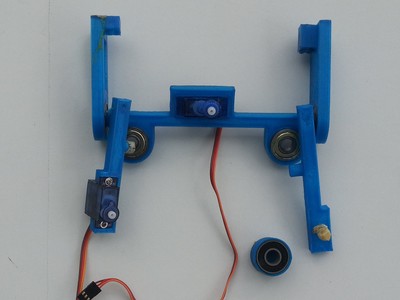
Ahora encajamos el rodamiento en la rueda dentada grande, colocamos las pestañas en la base cuadrada y atornillamos la rueda dentada a la base cuadrada. En la foto la rueda dentada aparece colocada hacia arriba para que veas el rodamento y los huecos en los que encajan las tuercas, aunque la base cuadrada se atornilla a esta pieza por la otra parte.
En el diseño inicial, hemos dejado el hueco para encajar ocho pestañas en la base cuadrada. Pero nos está funcionando bien utilizando sólo cuatro (en la disposoción que aparece en la foto). Hemos querido separar estos elementos para permitir distintas configuraciones y formas de pestañas.
Empezando a atornillar
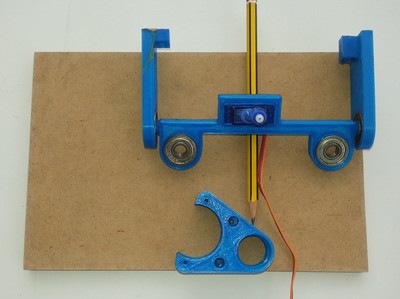
Vamos a empezar a colocar las piezas en nuestra base. Inicialmente encajamos los hombros en los rodamientos de los soportes laterales y presentamos estas piezas junto con el soporte del motor en la base. Se trata de alinear el agujero central del soporte del motor con el eje del servo que encaja en los hombros (ojo, no con el centro del servo, si no con el propio eje del servo). Después ya nos ocuparemos de la colocación de los soportes, ahora sólo vamos a atornillar el soporte del motor.
Nosotros colocamos este soporte lo más adelante posible en la tabla, para tener el mayor hueco disponible en la parte de atrás del robot y poder colocar lo que se nos ocurra (el arduino, una Raspberry, un soporte de cámara web...)
Montando los brazos
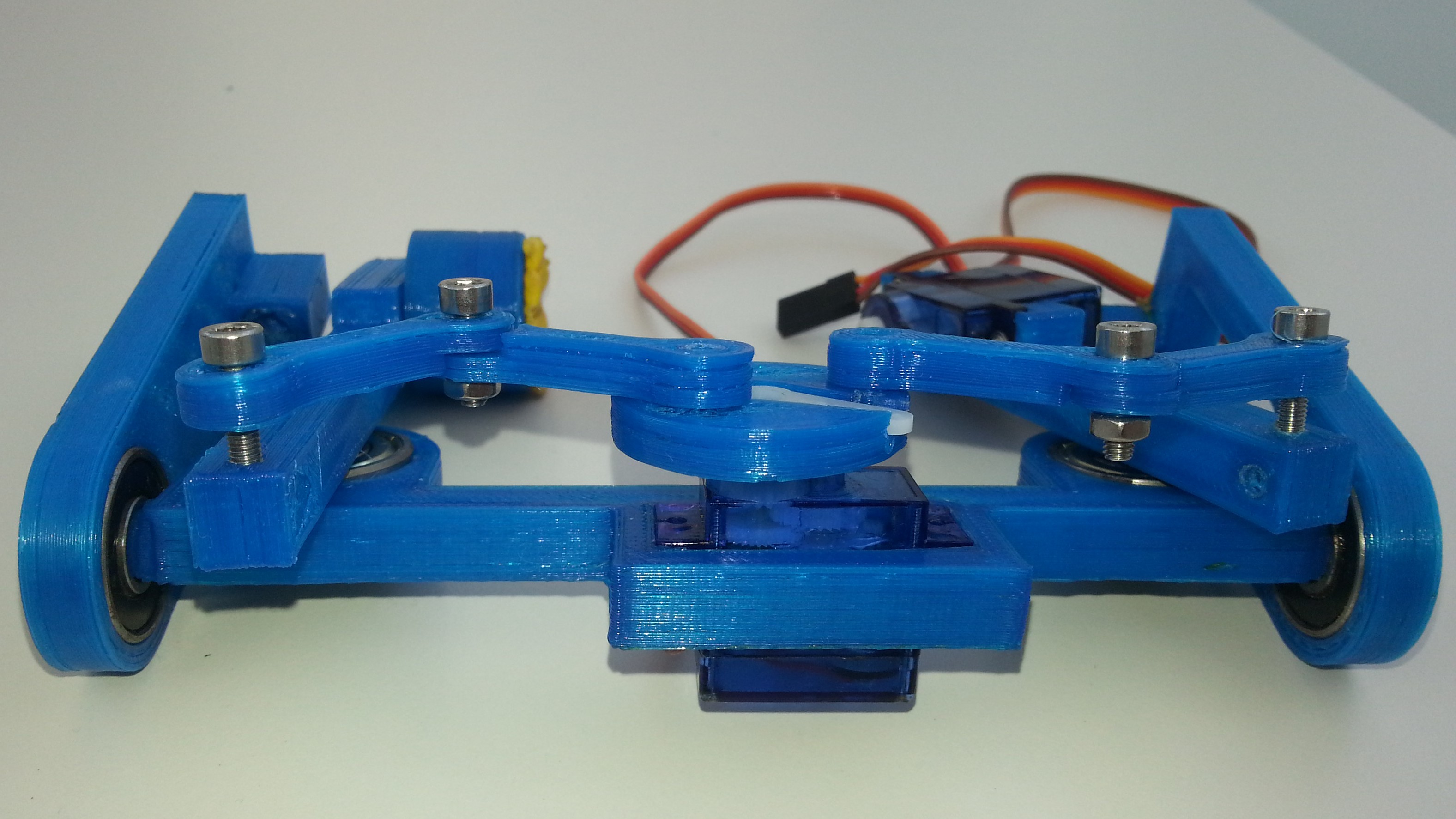
Continuamos encajando los brazos laterales en los rodamientos de los hombros. Fíjate que, tal y como se ve en la foto, el brazo que sostiene el servo es el izquierdo
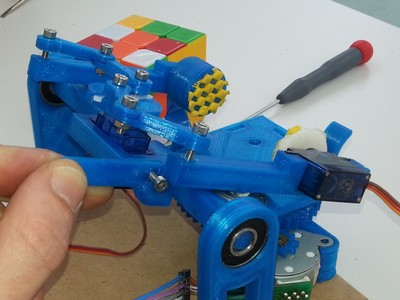
También encajamos un rodamiento más en el capuchón que se coloca en el brazo derecho. Este rodamiento permite que cuando el robot agarra el cubo esta "mano" gire libremente sin oponer resistencia.Si te preguntas para qué sirve esos trozos de cinta adhesiva que se ven en los cilindros donde se encaja el rodamiento... bien; eso fue un pequeño apaño que tuvimos que hacer para que el rodamiento ajustara ya que la impresión no nos quedó muy bien :).
El mecanismo de las pinzas
Las plaquitas de las pinzas permiten ajustar fácilmente la apertura de los brazos, que dependerá finalmente del grosor del material que utilizes para colocar en las "manos". Nosotros utilizamos esa tela de goma antideslizante que se vende en los chinos pero vale cualquier cosa que tenga cierto agarre (como la parte de abajo de las alfombrillas de ratón).
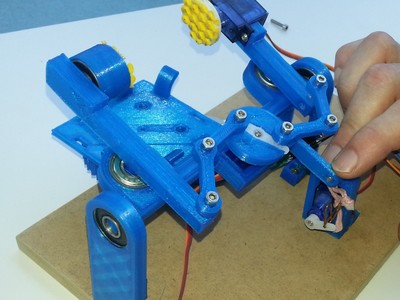
Encaja inicialmente las plaquitas de dos en dos (no aprietes demasiado los tornillos centrales, luego ya se ajustará) y atornilla cada par en el extremo de los brazos. Observa en la foto como hay un hueco entre las plaquitas conectadas al servo y el propio brazo; lo importante es que el sistema esté lo más horizontal posible pero al mismo tiempo el tornillo tendrá que ser lo suficientemente largo para entre una buena parte en la pieza. Una vez que creas que está todo nivelado, atornilla las plaquitas a la pieza del servo.
Atornillando los soportes laterales
Ahora vamos a atornillar los soportes laterales a nuestra tabla. Para ello colocamos todo el sistema del motor (el soporte del motor con la rueda dentada grande encajada encima por medio del rodamiento). El soporte del motor ya está atornillado así que sólo colocamos el motor (con su rueda dentada peque&ñacute;a) y con cuidado encajamos el rodamiento de la base en el soporte.
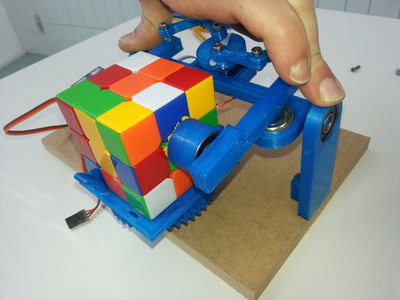
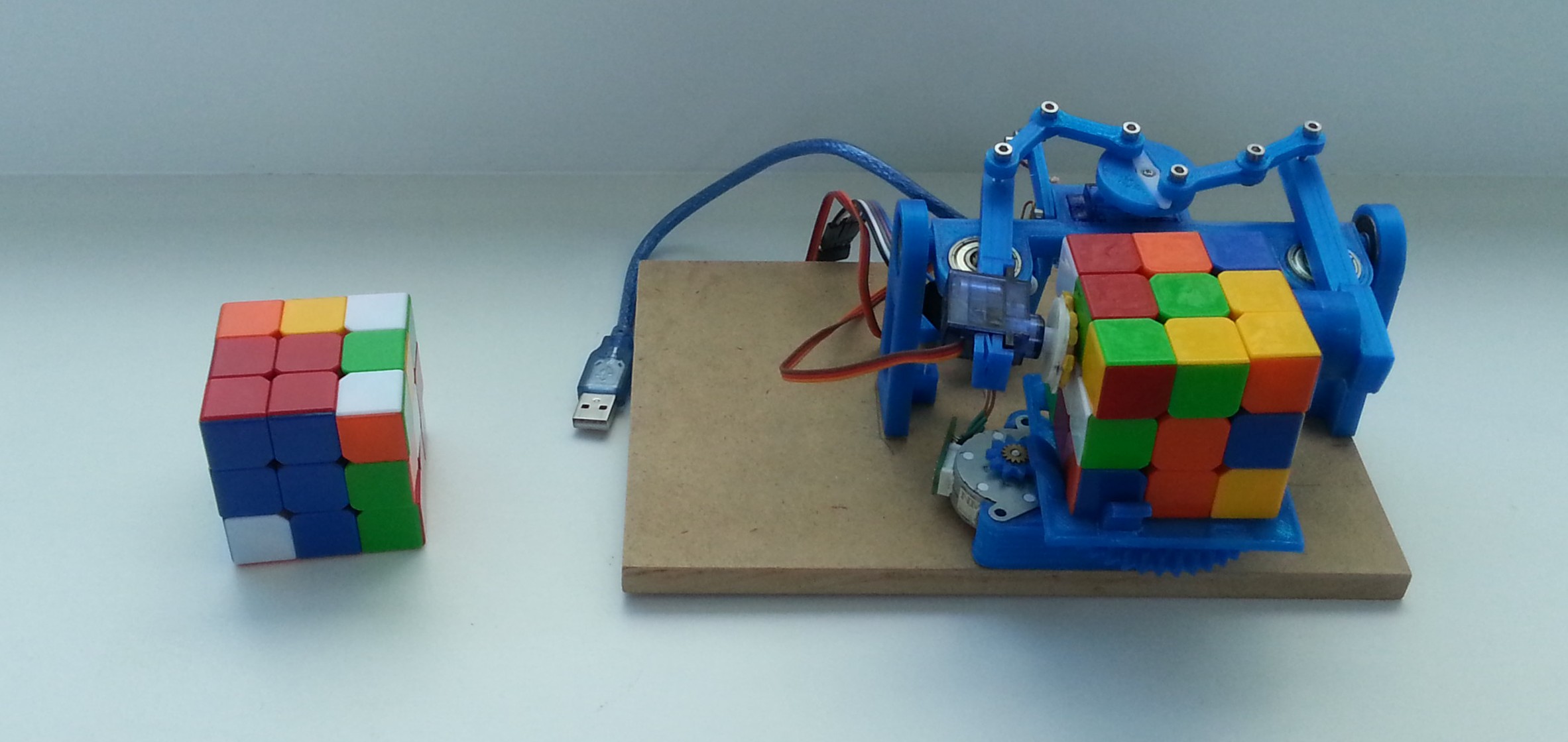
Ahora presentamos todo el conjunto de "brazos" y "hombros" para averiguar dónde atornillamos los soportes laterales. Para ello, colocamos nuestro cubo de Rubik en la base cuadrada, para tener una referencia, y situamos los soportes de modo que el centro de las dos manos -servo y capuchón con rodamiento- coincidan con el centro de nuestro cubo de Rubik.
La grúa
Le llamamos grúa al sistema que sube y baja los brazos de Robik. Por razónes históricas ya que... (es una larga historia).
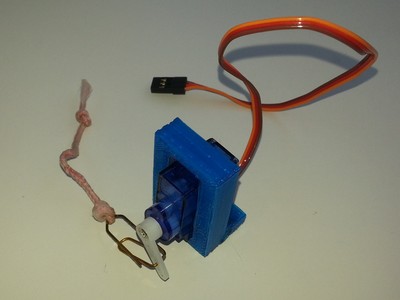
Para conectar el servo grúa a los hombros, nosotros utilizamos un clip que cabe por los agujeros del aspa del servo y un trocito de cuerda.
La palanca de la grúa
Nos falta atornillar el "apoyo-grua" en los hombros, al lado del hueco para el servo.
Alineando la grúa
Y finalmente, nos falta alinear atornillar el servo de la grúa en su soporte a nuestra base de manera. Como hicimos antes, alineamos un poco "a ojo". No hace falta que sea perfecto, simplemente que la cuerda mantenga cierta verticalidad mirando el robot desde atrás; lo importante es que el recorrido del servo permita que el cubo suba y baje lo suficiente para permitir los giros.
Voilà
Y ya está! Bueno; al menos una parte importante. "Sólo" nos falta montar la electrónica y subir el firmware.